“Most Entertaining” IEEE Robot
“The robot’s name was ‘Wakka.’ The name was derived from a subroutine called ‘Whack Whack.’ The subroutine is what tells the arms to “whack” the items into the robot.
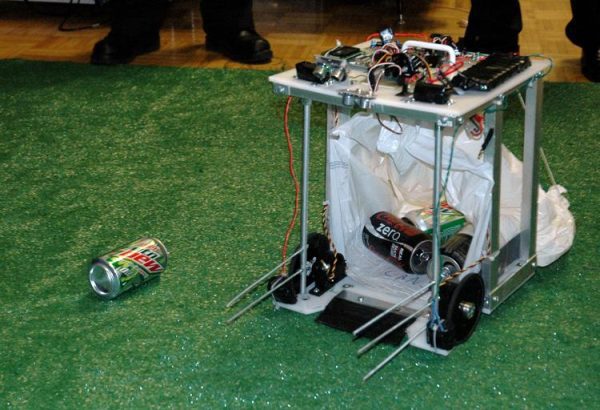
“Our robot was autonomous and began its course with the push of a button labeled ‘start.’ The robot dimensions were limited to one-foot by one-foot by one-and-a-half-foot. Our robot had two-wheel drive, with cabinet knobs on the bottom for gliding.
“The robot was to traverse a 10-foot-by-10-foot playing field made of green Astroturf and collect five cans, three plastic bottles and two glass bottles. The robot had to stay within the playing field with no human intervention. A wire ran along the perimeter of the field under the carpet. It was emitting a 10 kHz magnetic field. The robot used two transformers to detect the magnetic field. When the robot detected the field, it began to reverse.
“We used the sweeping arms to gather the items on the playing field. Ultrasonic sensors were used to detect whether or not a can was between the sweeping arms to initiate the gathering process.
“Because the circuitry of the robot was at the top, the robot rocked back and forth (as if to topple over) when going in reverse. We realized the rocking motion was beneficial in knocking the cans and bottles to the back of the robot, so we left it alone. At the competition, when our robot started rocking back and forth, the audience roared with laughter. We are certain this won us the Most Entertaining award.”
Video of Wakka in action.