49er Engineers Place Third at NASA Robotic Mining Competition
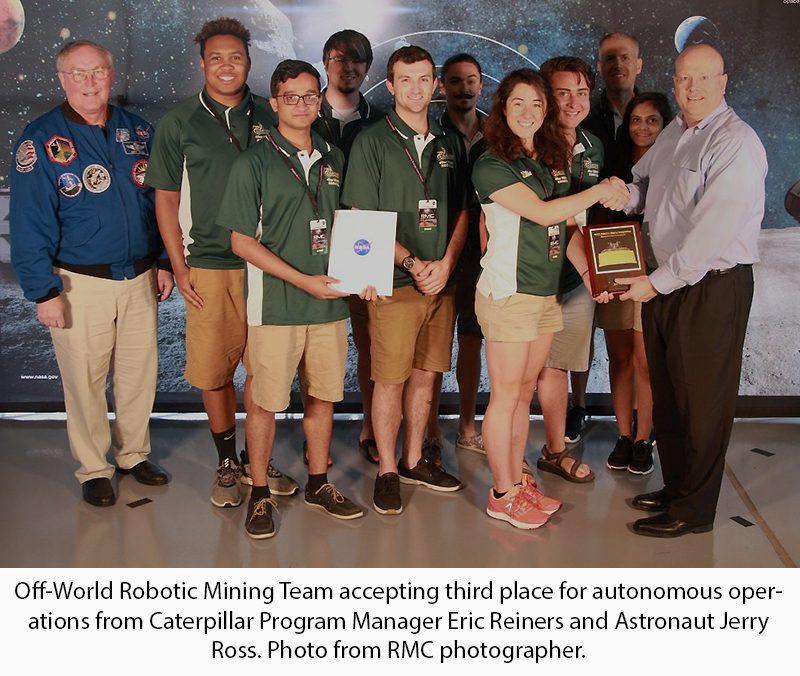
The UNC Charlotte Astrobotics Robotic Team, the 49er Miners, took third place in the Caterpillar Autonomy Award at the 2018 NASA Robotic Mining Competition at Kennedy Space Center on Friday May 18. The team joined the elite group of only a handful of schools in the history of the competition that have accomplished a fully autonomous mining run (approximately 50 colleges and universities have competed each year over the past nine years).
Last August, a team of seven interdisciplinary students from UNC Charlotte’s Lee College of Engineering came together to form this year’s team as part of the college of engineering’s Senior Design Program. Their mission was to program a robot to traverse an obstacle field of Martian soil, mine it and deliver back to the starting location. Autonomous operations is an important aspect of the mission, meaning the rover must use its own sensors and code to complete the mission without further commands.
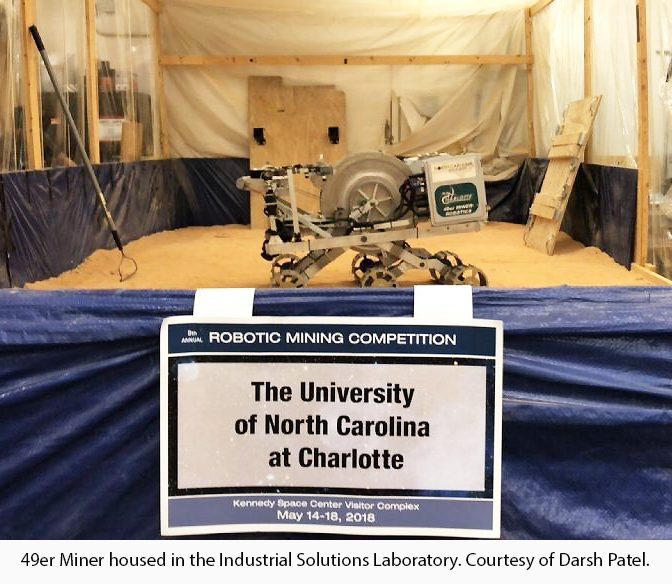
The team inherited the rover used in competition over the past four years by previous UNC Charlotte teams; as has occurred each year, they upgraded and modified the design, and then practiced using a student-built arena of sand to simulate mission operation. At competition last year, the rover suffered severe damage and wear to the systems that allow for digging and depositing of the regolith. After project mentor Dr. Aidan Browne briefed this year’s students on the history of the rover, the team followed the Systems Engineering process to decide which aspects to repair, improve, and replace.
With assistance in the form of a grant from the North Carolina Space Grant Consortium (NCSG), the team was able to purchase all the materials needed to complete the machining and assembly of their modified rover. Additional funds from the NCSG, the Senior Design Program and UNC Charlotte Student Government covered the team’s travel expenses for its week’s stay in Florida at the competition.
Ashley Thrower, systems engineering student, led the project this year ensuring the team used a systems engineering perspective to focus on the improvements, autonomy, and additional mission functionality. Shawn Sharkey and Elijah Pfeifer, mechanical engineering students, established design improvements for the collection system, resulting in new lifting arms and winch system. Mechanical engineering student Michael Bennett led the redesign of the conveyor system (previously destroyed during the 2017 competition) which allows for the regolith to be transferred into the collection bin.
To avoid subsystem collision from the last competition, Bennett worked with Pooja Patel, a computer engineering student, to choose sensors that would be integrated into the rover’s code. Pooja Patel and Darsh Patel primarily worked on LabVIEW coding to ensure the rover would complete the mission autonomously. Pooja, Darsh, and Tyriq Fitts, all computer engineering students, conducted testing on the improved prototype the remainder of the semester.

Upon arrival at Kennedy Space Center, Monday May 14, thunderstorms were forecasted in the area for the duration of the week, likely putting the facility under Phase 2 Lightening conditions and temporarily suspending operations. Due to this, NASA announced on Tuesday morning that they were cancelling the practice runs and immediately starting the competition to increase the chances of finishing by Friday. Without a practice run, the team was uncertain how the rover would interact with the Black Point 1 (BP-1) soil and the exact placement of beacons the rover uses to localize itself. Despite the challenges, UNC Charlotte’s first competition run that Tuesday morning was an amazing success; they proved that they could complete a fully autonomous mission!

During that first of two runs, the rover had issues collecting sufficient amounts of icy regolith (simulated by buried gravel). The team used the next day to brainstorm solutions based on what they learned from the outcome of the first competition attempt. Hauling the rover to the beach next to the hotel, the team worked on scoop redesign and mining time algorithms. This propelled Bennett, Pfeifer, and Sharkey to power through machining new scoops from spare sheet metal with only hand power tools, limited space and 12 hours to complete manufacture and assembly of the new parts.
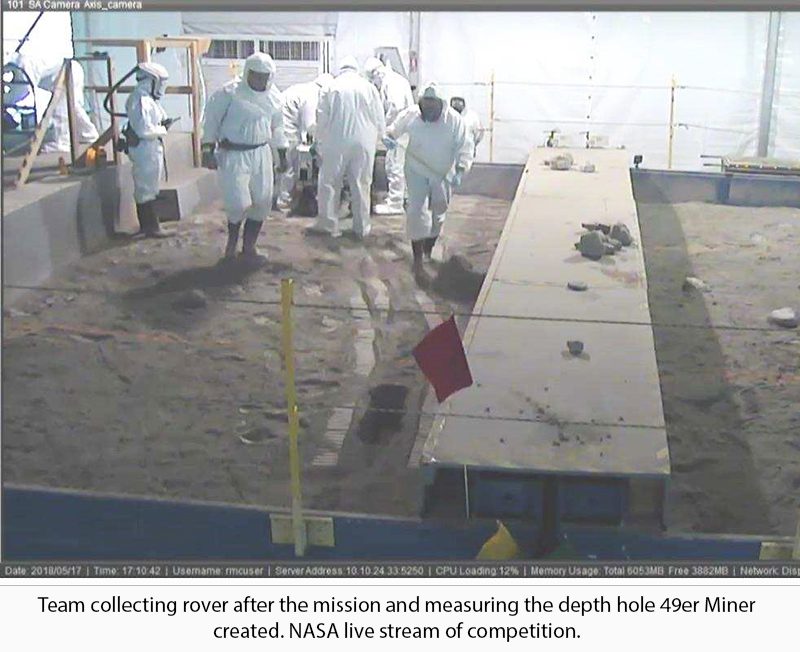
They successfully completed their task in time for Thursday’s second competition run. Pushing through Thursday on adrenaline, the team passed rover inspection with the additions bringing them to just under the weight limit. As the mission time began, 49er Miner’s cameras deployed and locked onto the beacons. Shortly after, the rover lost connection and Darsh Patel had to take over manual control of the rover to make it to the mining area. At this point, the rover was able to return to autonomous operation and successfully mine a deep hole collecting the precious icy regolith! With seconds left on the clock, as the rover was about to deliver its cargo, connection between Mission Control and the rover was dropped again, leaving the rover with a drum full of icy regolith but no mining points awarded to the team.
At the end of the week, with a full autonomous run and a partially autonomous run, the team was awarded third place for the autonomy category at the competition. After seeing this project come to life at Kennedy Space Center, meeting NASA’s launch director, astronauts, and other renowned engineers, the students considered the mission a success. This project allowed the young engineers hands on experience with engineering, robotics, and mission operations. The extent of the project and intensity of the competition allowed for every student to have a part in its completion. The team hopes this project continues at UNC Charlotte to give students the opportunity to work on the school’s legacy rover and ensure its continued success. As the project was ongoing, the team went into the community with the rover to explain the purpose and progress. The intent was engaging children in the wonders of science, technology, engineering, and math fields, furthering projects like this and inspiring the community and continued Space Association at UNC Charlotte.