Integrating Autonomous Vehicles with Variable Speed Limits
Self-driving vehicles will be a future reality, first becoming integrated with current human-driven vehicles and then, over time, completely replacing them. Lee College of Engineering researchers are working now to develop variable speed control systems to optimize the current state of human-driven vehicles, the mixture of human-driven and self-driving vehicles, and the future state of all self-driving vehicles, so as to harmonize traffic speeds, improve operational efficiency and enhance safety.
Students and faculty from the UNC Charlotte Center for Advance Multimodal Mobility Solutions and Education (CAMMSE) began the research of integrating variable speed limit controls with connected and autonomous vehicles to relieve freeway congestion in the fall of 2017. To date, the team has published four papers on its research, the most recent being an article in Journal of Transportation Engineering.
“There are two main technologies involved in the research,” said CAMMSE Director Dr. Wei Fan, a full professor of Civil and Environmental Engineering at UNC Charlotte. “First there is Connected Autonomous Vehicles (CAV) and then there is Variable Speed Limit Control (VSL). We are looking to optimize traffic flow scenarios ranging from 100 percent human-driven vehicles to 100 percent CAV using VSL.”
The Society of Automotive Engineers uses a ranking system of Levels 0-5 to classify autonomous vehicles based on their capabilities. Level 0 (L0) is the current state of driver-controlled vehicles. As autonomous capabilities such as hands-off steering and breaking increase, the ranking numbers increase. L5 vehicles are those that will be fully autonomous and integrated (and also most likely connected) with other vehicles and the surrounding infrastructure.
“L3, where some functions are controlled by the car under certain conditions but drivers are still necessary to take over in an emergency, is a very reasonable possibility in the next five to 20 years,” Dr. Fan said. “L 5 is perhaps still another 50 to 100 years away.”
The term connected vehicles refers to cars that can send and receive outside information through GPS and other systems. Connected vehicle information can include speed, location, acceleration and deceleration. Such information can be shared between vehicles (vehicle-to-vehicle or V2V) or between vehicles and the infrastructure (vehicle-to-infrastructure or V2I). Transportation engineers can then use this information to improve overall traffic flow through systems such as variable speed limits (VSL).
“The goal is to ‘harmonize’ traffic flow using VSL,” Dr. Fan said. “VSL changes speed limits based on real-time traffic data. Such systems are already deployed worldwide, in the United States, Germany, England and Sweden. VSL uses advanced algorithms to determine optimal speeds for maximum vehicle throughput and improved safety.”

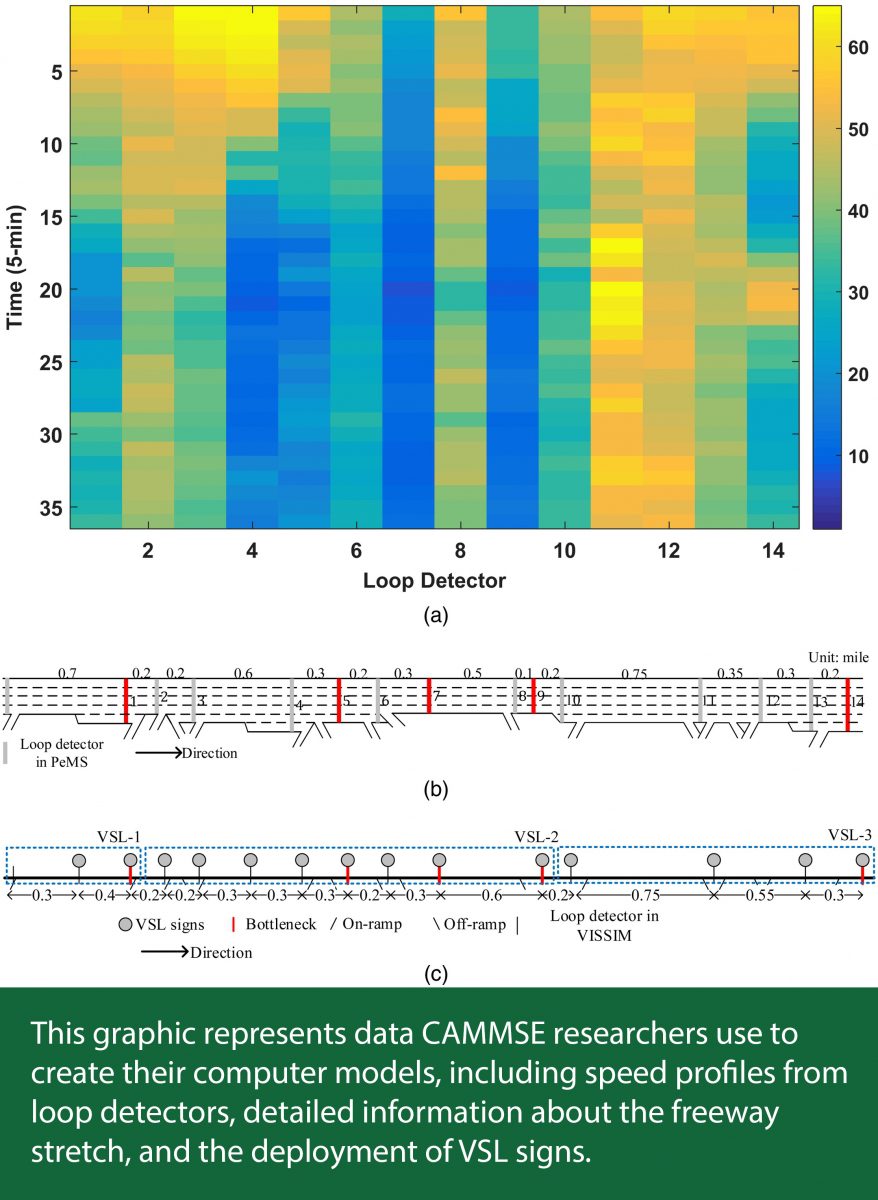
Dr. Fan’s group is working to optimize such VSL systems by improving the algorithms. Working with data collected from Los Angeles Interstate 5, they are using computer modeling to analyze multiple scenarios ranging from the current to future states that integrate V2V and V2I possibilities.
“Our computer models allow us to add CAVs of various levels into the equation,” Dr. Fan said. “VSL optimization of the CAVs is then done by plugging multiple scenarios into the equation and seeing what works best. So far, our research is showing that VSL can mitigate bottlenecks, smooth out traffic flow (and as a result reduce tailpipe emissions), and improve safety.”
The research also shows that as more CAVs of increasing autonomy are introduced into the equation, traffic flow improves even more. One reason for this is CAVs can follow one another much closer than human-driven vehicles, which can almost double road capacity.
“The research is developing some very promising results,” Dr. Fan said. “It’s been a very good project to date, and from here will go further and look at how CAV can improve highway and secondary-road capacity.”
FOR MORE INFORMATION contact:
Dr. Fan at wfan7@charlotte.edu or via phone: 704-687-1222.
Or visit the CAMMSE website.
Or see additional publications at:
- Yu, M. and Fan, W., Optimal Variable Speed Limit Control at a Lane Drop Bottleneck: Genetic Algorithm Approach, ASCE Journal of Computing in Civil Engineering, Volume 32 Issue 6, 04018049, pp. 1-17, 2018.
- Yu, M. and Fan, W., Tabu Search Strategies for Variable Speed Limit Control at a Lane Drop Bottleneck, ASCE Journal of Transportation Engineering, Part A: Systems, Volume 144, Issue 7, 04018033, pp. 1-12, 2018.
- Yu, M. and Fan, W., Calibration of Microscopic Traffic Simulation Models Using Metaheuristic Algorithms, International Journal of Transportation Science and Technology, 6(1), pp. 63–77, 2017.